




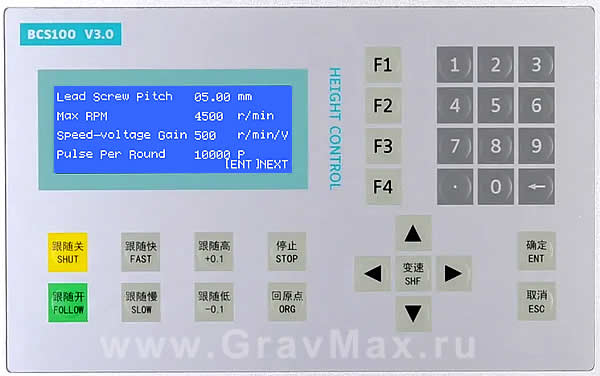
Нажатие клавиши <5> вызовет первую страницу меню настройки механических параметров:
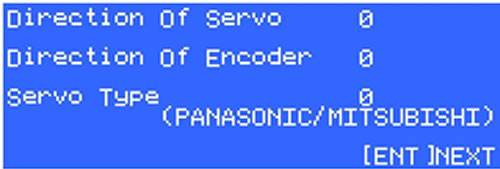
Вторая страница меню вызывается нажатием клавиши <ENT>:
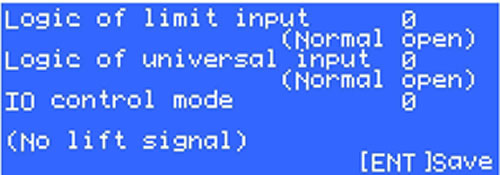
Третья страница меню вызывается повторным нажатием клавиши <ENT>:
Описание параметров приведено ниже:
Lead Screw Pitch (Шаг шарико-винтовой пары): Установка длины хода шарико-винтовой пары за один оборот. В теории, чем больше шаг шарико-винтовой пары, тем быстрее перемещение по оси Z. Рекомендуется использовать шарико- винтовую пару с шагом 5 мм
Max RPM (Максимальная частота вращения в оборотах в минуту): Установка допустимого верхнего предела частоты вращения сервопривода в соответствии с характеристиками двигателя и нагрузки. Как правило, он не превышает 4500 об/мин.
Speed-voltage Gain (Коэффициент усиления частоты вращения- напряжения): Установка фактической частоты вращения, приходящейся на 1 В. Частота вращения должна соответствовать фактической частоте вращения привода. Рекомендованное значение – 500 об/мин на каждый вольт
Pulse per Round (Число импульсов за оборот.): Установка количества импульсов датчика положения сервопривода на 1 оборот. Количество импульсов должно согласовываться с параметрами привода.
Direction of Servo (Направление вращения сервопривода): Настройка направления вращения сервопривода.
Direction of Encoder (Полярность сигнала датчика положения): Задает направление импульсов от датчика положения.
Servo Type (Тип сервопривода):
0 - Panasonic A5, Mitsubishi J3, Schneider Lexium23D или Fuji A5.
1 - Yaskawa Σ-V или Delta ASDA.
2 - Teco JSDEP.
Принципы действия входа нулевой частоты вращения, логика входных и выходных сигналов и параметры управления системой различаются для разных сервоприводов.
Logic of limit input (Логика входа пределов): Определение логики универсальных входов (IN5~6): 0 - нормально разомкнутый, 1 — нормально замкнутый.
Logic of General input (Логика универсального входа): Определение логики универсальных входов (IN1~4): 0 - нормально разомкнутый, 1 — нормально замкнутый.
IO control mode (Режим управления через устройство ввода-вывода): Если установлено значение 0, то при активации входа IN1 датчик отслеживания будет двигаться вниз, а при деактивации IN1 - останавливаться. Если установлено значение 1, то после деактивации входа IN1 датчик отслеживания сможет двигаться вверх только после активации входа IN3 (параметр не учитывается при использовании сетевого обмена данными).